实验室简介
清华大学智能网联汽车课题组
清华大学智能网联汽车课题组团队始创于上世纪80年代,前身是清华大学NVH课题组及车辆控制与智能交通实验室。团队依托清华大学车辆与运载学院和汽车安全与节能国家重点实验室,长期围绕智能网联汽车多模态全域感知、类脑智能决策、车路云融合控制、复杂系统动态设计与集成等前沿核心领域开展理论研究和技术攻关,构建了完整的“理论-技术-产品”三位一体的科研模式。现有固定人员15人,其中正高8人,副高4人,中级3人。团队成员入选中国工程院院士1人次,长江学者特聘教授2人次,国家杰出青年基金1人次,万人计划科技创新领军人才2人次,中青年科技创新领军人才2人次,国家优秀青年基金1人次,青年长江学者1人次。

团队承担国家“十三五”重点研发计划项目2项:“智能电动汽车的感知、决策与控制关键基础问题研究”、“自动驾驶电动汽车环境感知技术研究”;“973计划”课题1项:“车辆动力学系统关键状态估计与参数辨识”;国家自然科学基金18项:“汽车智能安全”(杰青基金)、“智能汽车的系统动力学与协同控制”(优青基金)、“极限工况下人-车-路闭环系统动力学建模与失稳风险辨识“(自然科学基金重大项目课题),“智能汽车纵向动力学行为与协同控制方法”(自然科学基金重点项目)、“人机共驾型智能汽车的动力学特性及协同控制方法研究”(自然科学基金重点项目)、“基于一致性超级感知容器的自动驾驶汽车传感器数据智能全息融合” (自然科学基金重点项目)等;“863计划”课题8项:“智能环境友好型车辆新概念系统技术”、”多目标交通信号和行驶车辆智能化协同控制技术研究”等。
团队主导建立了清华大学智能网联汽车与交通联合研究中心、“车联网”教育部-中国移动联合实验室、清华大学(汽车系)-日产智能出行联合研究中心、清华大学-丰田自动驾驶汽车人工智能技术联合研究中心以及清华大学(汽车系)-戴姆勒可持续交通联合研究中心等。成果形成了具有完全自主知识产权的汽车智能安全及节能驾驶辅助技术,得到大规模产业化,同时与长安、北汽、一汽、东风等国内车企,奔驰、日产、丰田等国际企业密切合作,联合开展智能汽车及车联网技术的基础问题攻关和产业化应用。
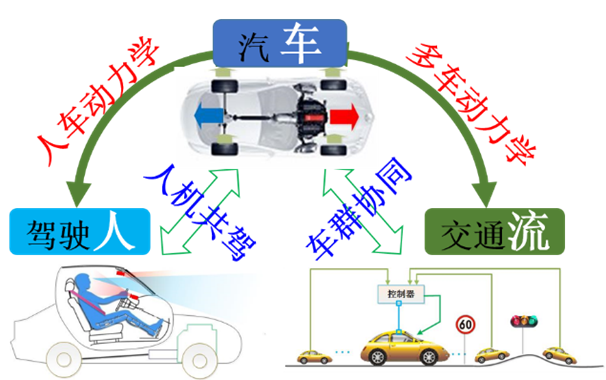
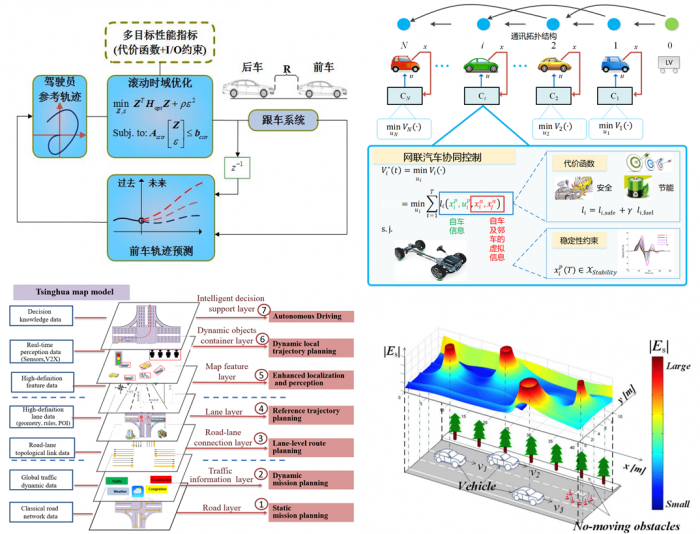
团队研究工作在汽车智能驾驶辅助系统的统一共用架构、行车风险定量评估及安全场建模、网联多车动力学解耦及分布式控制、汽车安全/节能/舒适多目标协同控制等方面取得了国际瞩目的先进成果,先后获国家技术发明二等奖2项:“基于行驶环境感知与控制协同的汽车智能安全新技术及应用”、“运动汽车噪声综合识别及控制技术”,国家科学技术进步二等奖3项:“基于路感跟踪的高性能电动助力转向系统关键技术及应用”、“车辆联网感知与智能驾驶服务关键技术及应用”、“基于共用架构的汽车智能驾驶辅助系统关键技术及产业化”,以及省部级及行业一等奖5项。另外获得IEEE国际智能汽车会议、世界智能交通大会等国际会议最佳论文奖6项。
团队在国家智能网联汽车战略规划中发挥了重大作用,主笔完成《中国智能网联汽车技术路线图》,推动一系列智能汽车领域的国家及行业标准制定。主导建立我国第一个汽车领域高校成果产业孵化基地(清华大学苏州汽车研究院),积极推动汽车领域科技成果的产业化转化,并建立了国内第一条具有自主知识产权的汽车智能安全产品生产线,打破了发达国家的技术垄断,提升了我国汽车智能驾驶辅助系统的开发水平和产品竞争力,为我国汽车智能化技术的产业化做出了重要贡献。







融合感知 - 复杂环境感知
1. 面向弱势道路使用者的车载多目标跟踪和运动预测方法
-
研究背景
易受伤害道路使用者如行人、骑车人或其他骑行者,在实际交通场景中很常见,具有多样性,但易受伤害且缺乏保护。易受伤害使用者的检测是保护他们的第一步,需要进一步跟踪连续帧间的同一目标的位置,形成运动轨迹,实现多目标跟踪,为后续预测其运动意图做准备。
- 研究成果
针对自动驾驶环境中的自车周围易受伤害道路使用者(VRU,包括行人和骑行者两类)的运动轨迹预测问题,提出了融合多轨迹预测因子的深度循环神经网络轨迹预测方法,同时考虑连续多帧间目标的位置、形状等运动特征线索和局部矩形框的深度外观卷积特征。
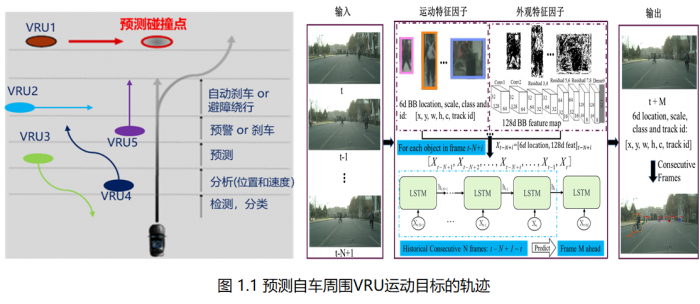
在清华大学-戴姆勒联合研究中心建立的易受伤害道路使用者多目标轨迹预测数据库中,综合评价了不同的循环神经网络变体(RNN/LSTM/GRU)、目标轨迹预测因子以及网络参数优化策略,验证了所提出的融合多轨迹预测因子...